由斯坦福大学的科研团队开发的一个可以模仿人类自主学习的机器人操作系统 Mobile ALOHA正式开源,Mobile ALOHA通过模仿学习(即观察人类操作然后模仿这些动作),仅通过50次任务演示,共同训练,它就能够自主完成日常生活中的各种任务,如执行打开厨房用具柜、洗锅、炸虾、做菜、打扫卫生、整理衣物、套被套等 50 多项家务。开发团队成员包括 Zipeng Fu、Tony Z. Zhao 和 Chelsea Finn。开发团队已经公开了包括机器人的说明、数据集、硬件代码和机器人训练代码在内的所有项目材料。
项目主页:https://mobile-aloha.github.io
学习代码:https://github.com/MarkFzp/act-plus-plus
硬件代码:https://github.com/MarkFzp/mobile-aloha
论文地址:https://mobile-aloha.github.io
教程:https://docs.google.com/document/d/1_3yhWjodSNNYlpxkRCPIlvIAaQ76Nqk2wsqhnEVM6Dc
网盘下载:https://pan.baidu.com/s/1Qwy6HtEjK1WLcboEadu47Q?pwd=m2g9 (资料已下载上传到国内网盘)
这款家用机器人成本为 3.2 万美元,包括 Trossen Robotics 的 ViperX 300 机器人臂 6DOF(6130 美元)、WidowX 250 机器人臂 6DOF(3550 美元)操作器,以及同一制造商的 Tracer AGV 移动机器人(7000 美元)。
https://www.bilibili.com/video/BV135411q7Bu
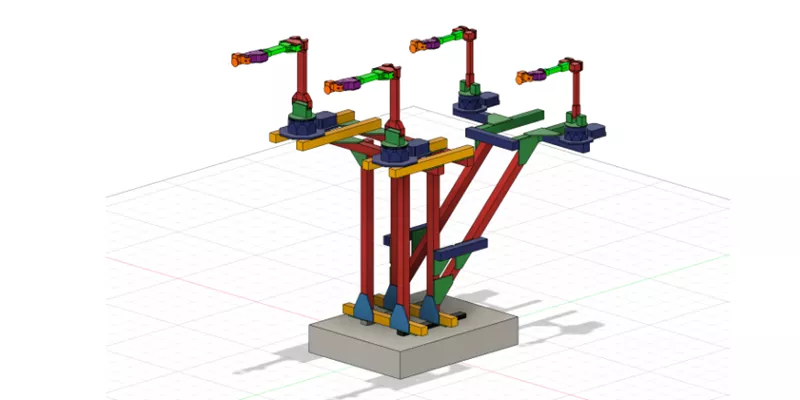
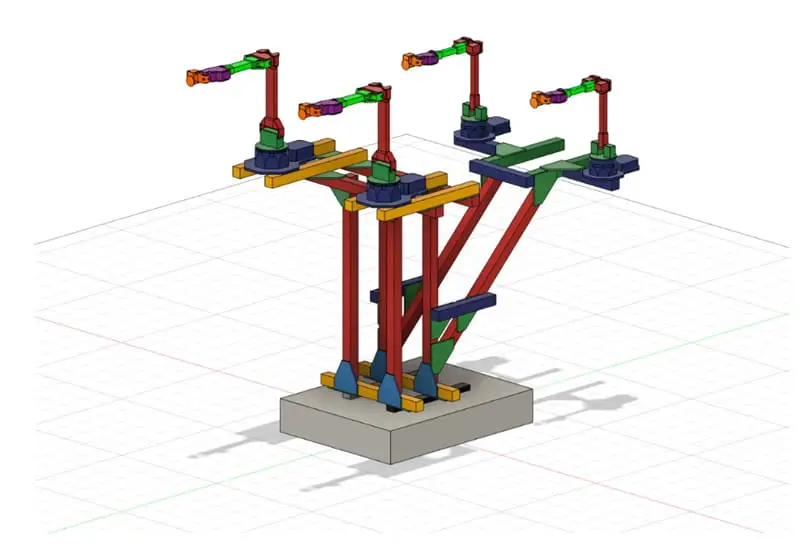
Mobile ALOHA的硬件组成:
Mobile ALOHA被装在了一个为仓库设计的移动台座上:Tracer AGV。
它可以承载 100kg,移动速度高达 1.6m/s,而成本仅为 7k 美元,同时使得机器人的占地面积减少了 45%,重量减轻了 15 公斤。 机器人垂直高度可达65厘米至200厘米,距底座100厘米。
- 机械臂:Mobile ALOHA配备了两个机械臂,每个臂有多个自由度,使其能够执行复杂的双手操作任务。
- 移动基座:系统包括一个移动基座,使机器人能够在不同的环境中移动和定位。
- 摄像头:Mobile ALOHA配备了两个手腕摄像头和一个顶部摄像头,用于捕捉环境和操作任务的视觉信息。
- 自带电源和计算能力:系统具备自带的电源和计算能力,使其能夠独立完成任务而不依赖于外部电源或计算设备。